
上海方晨科教设备制造有限公司
FCRXGZ-01W型柔性灌装自动化生产线实训系统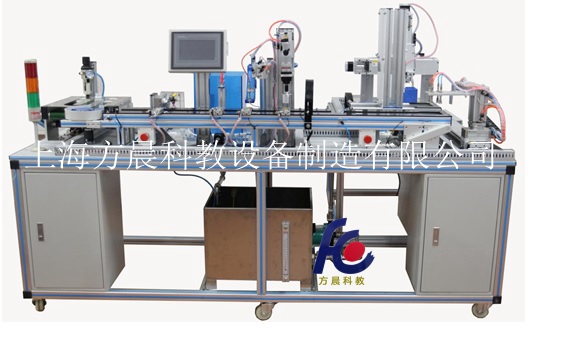
一、产品概述:
灌装柔性自动化生产线实训系统是一种典型的机电一体化、自动化类产品,它是为职业院校、教育培训机构等而研制的,它适合机械制造及其自动化、机电一体化、电气工程及自动化、控制工程、测控技术、计算机控制、自动化控制等相关专业的教学和培训。它接近工业生产制造现场基础上双针对实训教学进行了专门设计,强化了各种控制和工程实践能力。
系统包含了机电一体化专业中的气动、电机驱动与控制、PLC、变频器、触摸屏、传感器等多种控制技术,适合相关专业学生进行工程实践、课程设计及初上岗位的工程技术人员进行培训。
二、技术参数:
1、输入电源:单相三线AC220V ±10% 50Hz
2、工作环境:环境温度范围为-5℃~+40℃ 相对湿度<85%(25℃)海拔<4000m
3、装置容量:<1.5kVA
4、设备外型尺寸:221cm×171cm×145cm
三、系统组成:
1、控制系统一
由S7-1214主机及8入8出模块组成PLC控制系统、变频器D720以及电气控制元件等组成,系统控制下列单元:
2、空瓶输送单元
由输送带、电机、转运控制台、螺旋导料机构、直流减速电机(10W/24V 5r/m)、光纤传感器、电气元件等组成。主要完成将工件从原料输送带依次送到灌装工位。
3、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 直流减速电机 | 10W/24V 5r/m | 2 |
| 输送带 | 空瓶输送 | 1 |
| 检测传感器 | 光纤放大器及光纤 | 1 |
4、实训内容:
1)第一站传感器实验
2)第一站机械安装调试实验
3)PLC基本指令学习和实际应用实验
1、原料检测单元
由检测传感器、废料回收框、气动分拣装置等组成,主要完成对空瓶不合格品的分拣。
2、清洗、干燥单元
由定位机构、旋转气缸、气爪、双杆气缸、水泵、电磁阀、气动组件、光纤传感器、电气等组成。主要完成空瓶的清洗、干燥。传感器检测到空瓶后将空瓶搬运到清洗、干燥位置进行相应动作,完成后返回到传送带上
3、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 旋转气缸 | 90° | 1 |
| 双导杆气缸 | 行程:20mm | 1 |
| 气爪 | 1 | |
| 水泵 | DC24V | 1 |
| 清洗工作台 | 防渗漏 | 1 |
| 电磁阀 | 1 | |
| 检测传感器 | 光纤、磁感式 | 5 |
4、实训内容:
1)气动元件学习
2)传感器实验
3)机械安装调试实验
4)电气回路实验
5)PLC基本指令学习和实际应用实验
1、灌装站
由供水箱、灌装水箱、流量传感器、灌装泵、供水泵、灌装台、定位气缸、电气等组成,主要完成对清洗完成的空瓶进行定量灌装。
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 供水水箱 | 带液位显示 | 1 |
| 供水水泵 | AC220V 50Hz | 1 |
| 灌装水泵 | DC24V | 1 |
| 灌装水箱 | 带液面开关 | 2 |
| 流量传感器 | 1 | |
| 定位气缸 | 行程:20mm | 1 |
| 灌装头 | 1 | |
| 检测传感器 | 光纤传感器、磁感式 | 3 |
3、实训内容:
1)气动元件和回路学习
2)传感器实验
3)机械安装调试实验
4)电气回路实验
5)PLC基本指令学习和实际应用实验
6)水塔水位编程
7)定量灌装编程
1、加盖单元
由瓶盖供料机构、无杆气缸、真空发生器吸盘、定位气缸、供料电机、传感器等组成,主要完成对工件的输送及分拣。
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 无杆气缸 | 行程 100mm | 1 |
| 双杆气缸 | 行程 40mm | 1 |
| 双杆气缸 | 行程 20mm | 1 |
| 吸盘 | 1 | |
| 真空发生器 | 1 | |
| 供料电机 | DC24V | 1 |
| 导料台 | 1 | |
| 检测传感器 | 光纤、磁感式 | 7 |
3、实训内容:
1)气动元件和回路学习
2)传感器实验
3)机械安装调试实验
4)电气回路实验
5)PLC基本指令学习和实际应用实验
6)放料控制控制实验
7)加盖控制控制实验
1、拧盖单元
由气动拧盖机构、拧盖头、硅胶接头、双杆气缸、定位气缸、电气等组成,主要完成对加盖后的瓶子进行拧盖操作
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 气动拧盖机构 | 1 | |
| 拧盖头 | 铝 | 1 |
| 硅胶接头 | 硅胶 | 1 |
| 双杆气缸 | 行程:40mm | 1 |
| 双杆气缸 | 行程:20mm | 1 |
| 检测传感器 | 光纤、磁感式 | 5 |
3、实训内容:
1)气动元件和回路学习
2)传感器实验
3)机械安装调试实验
4)电气回路实验
5)PLC基本指令学习和实际应用实验
6)程序控制实验
1、成品检测单元
由检测传感器、废料框、气动分拣机构、等组成,主要完成对成品废料的分拣。
2、主传动带
由输送带、三相减速电机、铝合金支架、铝制加工件等组成,主要完成对瓶子的输送。
3、实训内容:
1)变频技术的学习
2)机械安装调试实验
3)电气回路实验
4)传送带控制实验
1、控制系统二
由S7-1214主机组成PLC控制系统电气控制元件等组成,系统控制下列单元:
1、打包搬运单元
由步进电机、步进电机驱动器、滚株丝杆、旋转气缸、真空吸盘、气爪、电磁阀、电气等组成。主要完成对灌装合格品进行打包搬运。
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 滑台 | 行程:600mm | 1 |
| 真空吸盘 | 4 | |
| 真空发生器 | 1 | |
| 气爪 | 1 | |
| 步进电机驱动器 | 64细分 DM556 | 1 |
| 步进电机 | 1.5A 角距:1.8度 | 1 |
| 单杆气缸 | 行程:50mm | 1 |
| 传感器 | 光电、磁感应 | 9 |
3、实训内容:
1)气动元件和回路学习
2)机械安装调试实验
3)电气回路实验
4)PLC基本指令学习和实际应用实验
5)运动控制程序实验
6)步进电机驱动控制实验
1、包装盒供料单元
由减速电机、传送带、料仓、光纤传感器、电气等组成。主要完成包装盒的放料。
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 减速电机 | DC24V | 1 |
| 传送带 | 1 | |
| 光纤传感器 | 1 | |
| 井式料仓 | 1 | |
| 传感器 | 光纤 | 1 |
3、实训内容:
1)机械安装调试实验
2)电气回路实验
3)PLC基本指令学习和实际应用实验
4)放料控制程序实验
1、运料小车单元
由小车、传感器组成。主要完成包装好后的成品进行搬运。(可选用寻迹小车)
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 小车 | DC24V | 1 |
| 传感器 | 2 |
3、实训内容:
1)小车控制实验
2)PLC基本指令学习和实际应用实验
1、控制系统三
由S7-1214主机组成PLC控制系统电气控制元件等组成,系统控制龙门堆垛单元
单元由龙门机构、步进电机、步进控制器、宽型气爪、电气等组成。主要完成对成品的存储、堆垛。(可选用机器人控制)
2、主要技术指标:
| 名称 | 型号规格 | 数量 |
| 龙门 | 行程:400mm*400mm*200mm | 1 |
| 气爪 | 宽型 | 1 |
| 步进电机驱动器 | 64细分 DM556 | 3 |
| 步进电机 | 1.5A 角距:1.8度 | 3 |
| 传感器 | 光电、磁感应 | 11 |
3、实训内容:
1)机械安装调试实验
2)电气回路实验
3)PLC基本指令学习和实际应用实验
4)龙门控制程序实验
5)运动控制实验
6)堆垛寻找编程
1、触摸屏监控单元:
采用昆仑通态EPC7062TD ,7英寸 STN256色等组成,主要完成监视各分站的工作状态并协调各站运行,完成工业控制网络的集成。总线结构采用NET网络通信,使各站之间的控制信息和状态数据能够实时相互交换。每站均配网线一根。
2、5口交换机:
5口交换机,及网线,通过交换机将3站PLC、电脑及触摸屏连接起来组成NET网络。
3、MCGS工业组态监控软件:
当3个单元全部进入联网状态时,管理员能够通过组态监控机中各种组态按钮方便的控制整个系统的运行、停止等。每个单元的工作状态等在监控画面上也能够清楚的看到。
4、配件
| 序号 | 名称 | 规格 | 数量 | 单位 | 备注 |
| 1 | 空瓶 | 50ml | 50 | 只 | |
| 2 | 瓶盖 | 白色 | 50 | 只 | |
| 3 | 网线 | 5 | 根 | ||
| 4 | 配套工具 | 工具箱:十字长柄螺丝刀,大、中、小号一字螺丝刀,中、小号十字螺丝刀,剥线钳,尖嘴钳,剪刀,电烙铁,镊子,活动扳手,内六角扳手(9把) | 1 | 套 | |
| 5 | 配套光盘 | 使用手册、编程软件、程序等 | 1 | 套 | |
| 6 | 空气压缩机 | 静音空气压缩机 | 1 | 台 | 静音 |
四、实训项目:
1、了解传感器的应用
2、观察气动元件的应用
3、掌握PLC控制技术
编程可完成:
1)系统故障检测
2)工件上料程序控制
3)工件搬运程序控制
4)工件检测程序控制
5)工件搬运安装程序控制
6)工件安装程序控制
7)工件分类程序控制
8)多工作工位程序控制
9)工作单元联网程序控制
10)步进电机驱动控制
11)机械手搬运控制
12)成废品分拣控制
13)变频调速控制
14)传输带控制等
4、电气控制系统安装调试
5、机械系统安装调试
6、电机驱动调试
7、系统维护和故障检测技术









