东莞市二郎神影像设备有限公司
车底安全检测系统技术方案
(固定式)CD-180
目录
1. 应用背景
车底藏匿由于隐蔽性强、检查难度大、漏检情况多以及公众对其危害的防范意识不强等特点,容易被安检忽视,从而使车底成为了不法分子的犯罪温床。例如:恐怖分子通过将炸弹藏匿于车底,制造汽车炸弹恐怖袭击事件;贩毒分子通过藏毒于车底进行贩毒运输;偷渡人员通过藏身于车底进行通关偷渡等等。可以说车底就是潜在的安全隐患!
2. 应用场景
当前车底检测已被列入大多数安全检查场合的例行检查项中,以下六大类安全防范等级较高的场所都有针对底盘安全检测的需求。
1)监狱、看守所、政府机关、驻外使馆、军事基地、公安机关部门等安全防范、反恐重点场所;
2)海关、边境的出入口;
3)机场、车站、港口及码头等人员密集出入的场所;
4)银行金库等重要金融场所出入口;
5)大型、重要会议及活动场所出入口;
6)高速公路出入口检查站。
3. 现状分析
目前车底检查的方式主要有手持反光镜式、机器人摄像头式、IPC配置鱼眼相机镜头式和面阵相机轨道式四种,四者各自的功能简介和特点如下:
Ø 手持反光镜式
![]() 手持反光镜式,顾名思义就是人工手持一根末端带有反光镜的设备进行检查。需要车辆停在检查区,由安保人员将反光镜推入车底,通过镜面反射成像来观察车底情况。显而易见,这种检查方式工具十分简陋,其成像效果差、检测效率低。容易受检查人员的主观意识干扰,影响检查结果,导致漏检率高、精度差!另外检查结果没法进行实时存储记录,无法实现后期排查与追踪,特别是通过底盘改装进行藏匿物品的犯罪情况,基本只能靠经验判断而无法以之前存档数据进行对比分析,无法实现信息化。而且检查人员必须近距离操作,其人身安全得不到保障,如果车底藏匿危险物品,容易造成检查人员伤亡事件。
手持反光镜式,顾名思义就是人工手持一根末端带有反光镜的设备进行检查。需要车辆停在检查区,由安保人员将反光镜推入车底,通过镜面反射成像来观察车底情况。显而易见,这种检查方式工具十分简陋,其成像效果差、检测效率低。容易受检查人员的主观意识干扰,影响检查结果,导致漏检率高、精度差!另外检查结果没法进行实时存储记录,无法实现后期排查与追踪,特别是通过底盘改装进行藏匿物品的犯罪情况,基本只能靠经验判断而无法以之前存档数据进行对比分析,无法实现信息化。而且检查人员必须近距离操作,其人身安全得不到保障,如果车底藏匿危险物品,容易造成检查人员伤亡事件。
Ø 机器人摄像头式
![]() 机器人摄像头式,就是检查人员通过操作机器人移动方向杆,来控制装有摄像头的机器小车在车底进行移动采集车底图像信息,然后通过配置的小型显示器进行实况视频检查。这种方式同样要求车辆停在固定的检查区内进行人工操作检查。也存在检查效率低、漏检率高、精度差、人身安全得不到保障等问题。虽然可以对检查过程的实况视频进行录像存储,但由于单个视频占用存储空间大,导致可供存储的条数比较有限,而且后期调取做分析对比操作较复杂。
机器人摄像头式,就是检查人员通过操作机器人移动方向杆,来控制装有摄像头的机器小车在车底进行移动采集车底图像信息,然后通过配置的小型显示器进行实况视频检查。这种方式同样要求车辆停在固定的检查区内进行人工操作检查。也存在检查效率低、漏检率高、精度差、人身安全得不到保障等问题。虽然可以对检查过程的实况视频进行录像存储,但由于单个视频占用存储空间大,导致可供存储的条数比较有限,而且后期调取做分析对比操作较复杂。
Ø IPC配置鱼眼相机镜头式
![]()
![]()
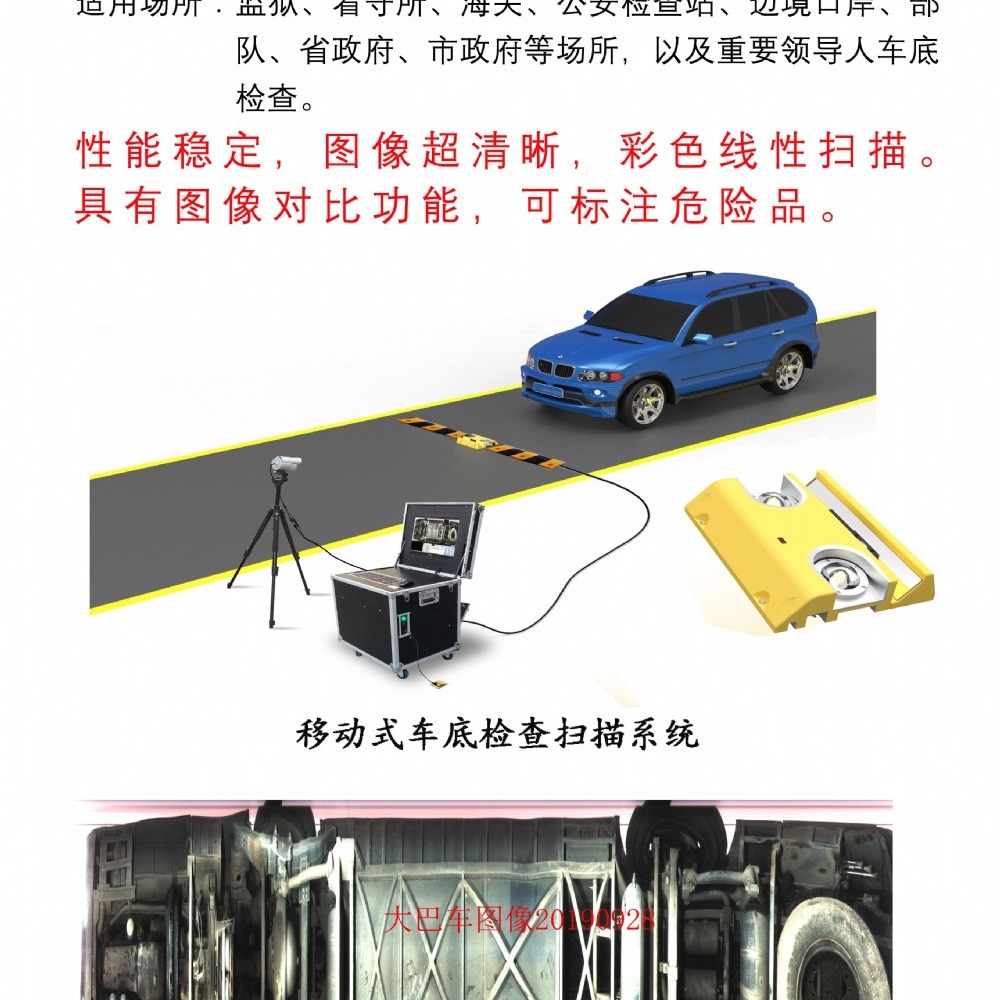
![]() IPC配置鱼眼相机镜头式,就是视频监控领域网络摄像机配置鱼眼相机镜头,设备安装在地上,过车时通过调取网络摄像机实况画面,实时显示过车过程中整个车底图像实况,进行实时录像并存储到网络硬盘中。该方式车辆不需要停在固定的检查区进行人工操作检查,只需要车辆低速通过设备上方,检查人员在岗亭内观察车底图像视频信息进行判断车底是否存在异常。相比之前两种,检查效率提升,漏检率降低,精度得到提高,检查人员可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障。虽然通过网络硬盘存储过车视频录像,存储条数上明显增加,但后期调取做分析对比同样操作复杂。最关键的是由于鱼眼镜头成像畸变严重,导致车底图像边缘信息缺失严重,且视角只有120°左右,所以无法采集到车底边沿图像。
IPC配置鱼眼相机镜头式,就是视频监控领域网络摄像机配置鱼眼相机镜头,设备安装在地上,过车时通过调取网络摄像机实况画面,实时显示过车过程中整个车底图像实况,进行实时录像并存储到网络硬盘中。该方式车辆不需要停在固定的检查区进行人工操作检查,只需要车辆低速通过设备上方,检查人员在岗亭内观察车底图像视频信息进行判断车底是否存在异常。相比之前两种,检查效率提升,漏检率降低,精度得到提高,检查人员可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障。虽然通过网络硬盘存储过车视频录像,存储条数上明显增加,但后期调取做分析对比同样操作复杂。最关键的是由于鱼眼镜头成像畸变严重,导致车底图像边缘信息缺失严重,且视角只有120°左右,所以无法采集到车底边沿图像。
Ø 面阵相机轨道式
面阵相机轨道式,需要在地面开挖较长的地槽,在地槽内架设轨道,车底检查时需要将![]() 车辆停在地槽上方,然后由下方轨道上的面阵相机自动移动到不同的位置完成拍照,再将拍到的图片通过软件进行拼接形成完整的车底图像。这种方式漏检率较低,精度较好,检查人员同样可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障,且以图片的形式保存车底图像信息,后期调取做分析对比操作相对简单。但前期的施工量较大,开挖的槽长度较长(10m左右)。检测时需要停车较长时间,通行效率低。由于最终图片是由多张图拼接的,会导致部分重叠等问题,检测效果一般。而且由于下方轨道频繁启停运行,使用寿命受影响较大。
车辆停在地槽上方,然后由下方轨道上的面阵相机自动移动到不同的位置完成拍照,再将拍到的图片通过软件进行拼接形成完整的车底图像。这种方式漏检率较低,精度较好,检查人员同样可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障,且以图片的形式保存车底图像信息,后期调取做分析对比操作相对简单。但前期的施工量较大,开挖的槽长度较长(10m左右)。检测时需要停车较长时间,通行效率低。由于最终图片是由多张图拼接的,会导致部分重叠等问题,检测效果一般。而且由于下方轨道频繁启停运行,使用寿命受影响较大。
可以看出这四种车底检查方式都有各自的局限性,主要缺陷点如下:
1)检查效率低:手持反光镜式和机器人摄像头式都要求车辆停在检查区内,通过人工操作检查,至少需要花费几分钟时间;面阵相机轨道式也要求车辆停在地槽轨道上方,然后由轨道上的面阵相机自动移动到不同位置拍图拼接成一幅完整的车底图片,但整个流程相对比较耗时,特别是像货车这种车体较长的车辆。总的来说,这三种方式通车效率均不高。
2)漏检率高-精度低:手持反光镜式和机器人摄像头式均是人工操作检查,受检查人员主观意识影响,容易出现漏检现象;IPC配置鱼眼相机镜头式由于鱼眼镜头成像畸变及视角小等原因,导致成像效果差,藏匿在车底边缘的物体容易出现漏检。
3)信息化程度低:手持反光镜式没法进行车底图像信息实时存储记录,无法实现后期排查与追踪,无法实现信息化;机器人摄像头式单个视频占用存储空间大,可供存储的条数少,信息化程度低。
4)检查人员人身安全保障性低:手持反光镜式和机器人摄像头式均需要近距离贴近车辆进行操作,如果车底藏匿危险物品,容易造成检查人员伤亡事件。
5)施工及后期维护成本高:面阵相机轨道式需要在地面开挖较长的地槽,并在地槽内架设轨道,前期施工繁琐,安装成本高;另外轨道频繁启停运行,使用寿命受较大影响,后期维护费用高。
4. 产品概述
针对当前车底检查方式及应用现状,我公司自主研发了车底检测系统。它是基于车牌为“身份”,自动检测车辆并对车底进行图像采集、显示、拼接、抓拍汇总、比对报警、自动环控为一体的车辆安检系统。该系统在车辆经过出入口时,通过车底盘线阵扫描成像系统对当前车辆进行底盘图像信息采集;在车辆通过后,将车底盘图片传输到主控台,并在系统软件管理平台界面进行显示,方便检查人员进行底盘异物识别。同时通过视频分析自动提取车辆车牌信息,然后将车辆车牌信息和车辆车底盘图片进行自动匹配并存档。能够有效防止车底盘藏匿炸弹、武器、生化危险品、危险人物出入重要场所;防止车底盘携带毒品、非法走私品乃至非法移民通过检查站。该系统由传统人工探测车底盘变为自动成像,车辆无须停止,以一定速度通过设备上方即可,极大提高了检查通行效率;可以在一定距离外的岗亭内观察过车车底图片,无须与检查车辆近距离接触,更好地保障安全检查人员的生命健康安全。
5. 系统结构及功能原理
车底检测系统由前端设备和后端平台两部分组成,前端设备进行数据采集和设备硬件控制,后端平台管理软件进行数据管理和应用。其工作原理如下:来车时由第一道地感线圈自动感应到来车触发信号,并将来车信号传输给控制器;由控制器给车检器和出入口相机同时下发功能触发信号,控制车检器开启补光灯,线阵相机开始图像采集,同时出入口相机抓拍识别车辆车牌信息,并将车辆车牌信息上传到软件平台;车辆通过第二道地感线圈后,由地感线圈自动感应到车辆离开,并将对应信号传输给控制器;然后由控制器给车检器下发工作停止信号,控制车检器将补光灯关闭,线阵相机停止图像采集,并将车辆通行过程中采集到的图像信息合成一副完整的过车车底图片,上传到软件平台;最后由软件平台进行数据存档和管理。
▲车底检测系统组成拓扑图
![]()
▲车底检测系统设备组成图
6. 系统各组件功能介绍
1) 触发模块(线圈):在车辆经过线圈时,给控制器发送对应触发信号。
2) 车检器:由线阵相机模组、LED补光灯组件和保护罩三部件组成。负责在车辆经过时采集车底盘图片,在车辆进入时开始采集,在车辆离开时停止采集,最后将采集到的图像合成一幅完整车底盘图片通过控制器交换机模块传输到主控台。
![]()
3) 出入口相机:在车辆进入或离开出入口时,识别采集车辆车牌信息,并在车辆经过后将车辆车牌信息通过控制器交换机模块传输给主控台。
4) 控制器:负责当车辆进入时,下发信号给出入口相机进行车辆车牌信息识别采集并将识别到的车辆车牌信息上传到主控台以及控制车检器开始采集车底盘图像;当车辆离开时,下发信号控制车检器停止采集车底盘图像,然后将采集到的图像合成一副完整的车底盘图片,通过控制器内置交换机模块上传到主控台;
5) 主控台:是一台安装有深圳市超盾电子有限公司自主研发的软件管理平台的工业级计算机,具备显示采集到的车底盘图片、记录车辆车牌信息、车辆信息管理、车辆进出车底盘图片对比、车底盘历史图片对比等功能。
7. 系统特性
l 画质效果好,视场角度大
Ø 车底图像分辨率最大可达2000万像素,达到A级要求,且图像主观评价满足GB/T 7401-1987的规定;
Ø 车底图像灰度等级最大可达11级,且图像灰度等级的判定满足GB/T 6996-2012的规定;
Ø 采用先进的线阵工业相机,结合深圳市超盾电子有限公司十多年深厚的ISP图像处理技术,确保车底成像画质出众;
|
|
▲深圳市超盾电子有限公司车底检测系统采集的车底图像效果 |
▲友商车底检测设备采集的车底图像效果 |
Ø 视场角最大可达180°,能够完整采集到轮胎轮廓边缘,做到无死角成像;
Ø 采用千万像素工业级镜头,成像畸变小、色彩还原好、失真度低、清晰度高。
|
||
▲车底图像完整呈现-无死角 |
||
|
|
|
▲车底图像放大效果-清晰度高 |
||
l 过车出图快,可存储追溯
Ø 无需停车检测,成像出图时间≤1秒;
Ø 图片可存储可追溯,存储载入时间≤1秒。
l 适应车速广,可准确测速
Ø 适用车速≤50km/h,最高适应80km/h;
Ø 不同车速,及变速通过情况下通过,检测均无压力;
Ø 支持对通过的车辆进行测速,测速结果误差在±10%以内。
l 防护性能优,安全等级高
Ø 防护等级为IP68,可适应长时间复杂多变的户外工作环境;
Ø 多重密封设计:防水、防尘、防潮、防霜、防雾、抗碾压;
Ø 良好的承重硬件设计,可承重30吨。
l 配套专业软件,支持功能全
Ø 具备车牌识别功能的系统,支持车牌信息关联车底图片;
Ø 支持按照日期、时间等信息快速检索到已采集的车底、车牌及车辆外观图像;
Ø 支持同时对8路1080P分辨率的前端摄像机视频进行解码,并显示实时视频监控界面;
Ø 支持对已采集的车底图像进行锐化、白平衡或调整对比度、饱和度等处理以取得最佳图像质量。
![]()
![]()
▲配套软件界面
l 支持平台对接,实现监控一体化
Ø 可对外支持SDK开发接入第三方平台。
l 其他功能特性
Ø 车底图像采集组件具备温湿度传感器,并能检测温湿度并显示;
Ø 设备控制箱:支持系统I/O控制、交互式智能控制;
Ø 具备联网集群功能,多台设备可以进行图片共享。
8. 产品技术参数
Ø 车底检测系统产品技术参数
备注:标注★项为控标优势点(即10、11、12、21、23、28、31项),供参考。
1) 采用彩色线阵工业相机扫描技术动态方式成像;
2) 底盘成像显示时间:≤1秒;
3) 底盘存储或载入时间:≤1秒;
4) 检测车辆底盘高度:60~2000mm;
5) 检测车辆底盘宽度:≤4500mm;
6) 适应环境温度:-35℃ ~ 70℃;
7) 视场角度:~180度;
8) 适应环境湿度:<90%RH;
9) 检测车速:建议≤50km/h,最高适应80km/h;
10) 车底图像分辨率:最大支持2000万像素,符合A级要求;★
11) 车底图像灰度等级:最大支持11级;★
12) 成像设备及结构组件防护等级:IP68,适应水下1.2m持续24小时;★
13) 车底图像扫描系统主体支持承压重量:30吨;
14) 底盘成像设备多重密封设计:防水、防尘、防潮、防霜、防雾、抗碾压;
15) 照明组件:6颗80W单体密封LED面光源,寿命≥60000h;
16) 支持系统供电范围:AC100V~240V;
17) 底盘图像数据传输距离:≤100米;
18) 车底图像显示方式:大幅面横向彩色显示;
19) 车底图像存储格式:标准JPEG图像格式;
20) 场景图像显示记录:≥1路(可扩充多路);
21) 具备车牌识别功能的系统,其车牌抓拍率:≥99%,识别率:≥99%;★
22) 支持以车牌信息关联车底图片;
23) 系统支持同时对8路1080P分辨率的前端摄像机视频进行解码,并显示实时视频监控界面;★
24) 系统软件支持对已采集的车底图像进行锐化、白平衡或调整对比度、饱和度等处理以取得最佳图像质量;
25) 系统支持按照日期、时间等信息快速检索到已采集的车底、车牌及车辆外观图像;
26) 系统支持对通过的车辆进行测速,测速结果误差在±10%以内;
27) 车底图像采集组件具备温湿度传感器,并能检测温湿度并显示;
28) 系统支持采集到通过车辆的完整轮胎,车底图像能够完整显示轮胎轮廓;★
29) 设备控制箱:支持系统I/O控制、交互式智能控制;
30) 具备联网集群功能,多台设备可以进行图片共享。
31) 图像采集性能等级试验:根据系统车底图像采集设备采集到的图像质量不同。产品图像质量应该要达到A级。图像主观评价应符合GB/T 7401-1987的规定,车底图像灰度等级的判定应符合GB/T 6996-2012的规定。★
Ø 工控机产品技术参数
1) 机箱:ARC-3600;
2) 电源:250WATX电源(AC100~240V自适应);
3) 主板:EMB-H81;
4) CPU:Intel I5-4570,主频3.2GHZ,4核 ,4线程;
5) 内存:8GB DDR3L工业级内存;
6) 硬盘:2TB HDD;
7) 串口:RS232*2;
8) 网口:2*10/100/1000M 自适应网口,1*10/100网口;
9) USB:6*USB Port;
10) 显示:VGA&HDMI;
11) OS:WIN7 64BIT 专业正版;
12) 认证:CE&FCC。
Ø 卡口相机技术参数
参数分类 |
参数名称 |
参数值 |
传感器类型 |
1/2.7英寸 CMOS |
|
快门 |
1/50~1/10000,手动或自动 |
|
扫描方式 |
逐行扫描 |
|
坏点校正 |
支持 |
|
曝光模式 |
支持全自动;自定义区间自动;自定义 |
|
白平衡 |
支持全自动;色温区间自动;自定义色温 |
|
边缘增强 |
支持 |
|
镜头参数 |
镜头接口 |
φ14 |
镜头焦距 |
2.7mm~12mm |
|
焦距控制 |
电动变焦 |
|
光圈控制 |
自动光圈 |
|
图像参数 |
图像压缩标准 |
JPEG |
图像分辨率 |
1920×1080或1600×1200 |
|
视频压缩标准 |
标准H.264 high profile 5.0 |
|
视频码率 |
H.264码率可调 |
|
视频帧率 |
25fps |
|
视频分辨率 |
1920×1080或1600×1200 |
|
图像设置 |
饱和度/亮度/对比度/白平衡/增益/3D降噪通过软件可调,支持宽动态 |
|
触发方式 |
I/O线圈触发 |
支持 |
RS485线圈触发 |
支持 |
|
视频检测 |
支持 |
|
功能 |
白名单 |
最大支持10000条白名单车辆,可直接联动道闸输出 |
智能识别 |
车牌识别、车身颜色识别、车标识别 |
|
远程控制 |
可通过Web方式远程配置、控制 |
|
OSD信息叠加 |
支持,可定义时间、地点、车牌等 |
|
图像防篡改 |
支持,视频/图片具备水印及校验功能 |
|
接口 |
内置LED灯 |
内置2个LED指示灯 |
网络接口 |
1个,100M以太网接口 |
|
RS485接口 |
1个 |
|
I/O输入接口 |
2路,光耦输入(开关量),可用于线圈输入 |
|
报警输出 |
2路,光耦输出,可用于联动道闸 |
|
存储接口 |
内置1个TF卡接口 |
|
常规参数 |
供电 |
AC 100V~240V |
功耗 |
<10W |
|
工作温度 |
﹣30℃~﹢70℃ |
|
工作湿度 |
10%~90% |
|
尺寸(mm) |
404×164×132 |
9. 软件平台功能介绍
显示车底采集图片和车辆车牌抓拍图片、出入口卡口相机实况画面、场景监控相机实况画面、记录过车信息、进出车辆数量统计显示、车底相机&出入口相机连接状态显示、过车车辆车牌截取显示、识别错误车牌号更改操作以及用户过车车底检查确认操作。
![]()
Ø 放大镜功能:对车底图片局部进行放大显示;
![]()
双击车底图片可以进入车底图片处理界面,对车底图片进行专业的图像处理(包括亮度、对比度、饱和度、色度调节、黑白处理、边缘增强及超级增强处理)。
![]()
Ø 车底盘图片对比
双击右侧过车列表中的某条记录,可以将该车底图片和对应的车辆数据库里的车底图片,以及前一次过车记录的车底进行比较。车辆信息和车辆数据库车辆车牌抓拍图片及车底扫描图片只有在车辆管理数据库中有对应车辆的信息时才有内容。
![]()
Ø 车辆管理:添加需要布防跟踪的车辆信息,包含车底图片和车辆车牌信息等。
![]()
Ø 过车记录查询
点击车辆查询按钮,进入过车历史界面查询,支持过车历史记录信息查询、查看及记录导出。支持按过车时间、抓拍设备、车辆颜色、车牌号码、车牌颜色及检查结果等条件进行设置查询。
![]()
注意:车辆信息一览,只有车牌对应的车辆信息已经事先录入到车辆数据库中时,才能显示。
Ø 产品清单
序号 |
物料名称 |
型号规格 |
数量 |
单位 |
备注 |
1 |
固定式车底扫描主体 |
1195*322*278 |
1 |
台 |
平板及以上厚度38MM |
2 |
底座 |
1300*390*270 |
1 |
台 |
|
3 |
室外机柜 |
850*600*220 |
1 |
台 |
|
4 |
控制盒(含绿插接头) |
1 |
台 |
2位插11个,6位插2个 |
|
5 |
卡口相机 |
1 |
台 |
根据抓拍车牌系统数量 |
|
6 |
8018支架 |
1 |
个 |
根据抓拍车牌系统数量 |
|
7 |
卡口相机立杆 |
高度1.2M |
1 |
个 |
根据抓拍车牌系统数量 |
8 |
工控机 |
1 |
台 |
||
9 |
显示器 |
20.5寸 |
1 |
台 |
|
10 |
键盘 |
1 |
套 |
||
11 |
鼠标 |
1 |
套 |
||
12 |
相机模组线缆 |
14*0.5 |
1 |
根 |
长度15M |
13 |
LED灯模组线缆 |
3*0.5六合一线缆 |
1 |
根 |
长度15M |
14 |
地感线圈 |
FVN 1.5 |
2 |
卷 |
65M一卷 |
注:
1. 以上物料为单车道单向扫描标准BOM单,请现场人员根据BOM清单进行核对。
2. 根据现场施工需要,请现场施工人员自备如下物料:
l 75MM镀锌钢管以及PVC管若干米(参考主设备安装位置至室外机柜的走线距离确定)。
l 32MM镀锌钢管或PVC管若干米(参考卡口相机位置至室外机柜的走线距离确定)。
l 根据现场实际情况准备3*1.5MM2 电源线缆若干米(参考现场配电柜至室外机柜、卡口相机至室外机柜的走线距离确定)。
l 根据现场实际情况准备六类屏蔽网线若干米(参考现场工控机放置位置至室外机柜的走线距离确定),六类屏蔽网线头若干。
l 根据现场实际情况准备超五类网线若干米(参考现场工控机放置位置至显示大屏或网络柜、卡口相机至室外机柜的走线距离确定)。
l 2*0.5MM2 线缆若干米(参考卡口相机位置至室外机柜的走线距离确定)。
l 高压防水胶带及绝缘胶带各一卷(每套设备)
l 玻璃胶及打胶工具一套(每套设备)
l 200MM长度木棍两根(预埋底座时支撑使用)
车底安全检测系统技术方案
(固定式)CD-180
目录
1. 应用背景
车底藏匿由于隐蔽性强、检查难度大、漏检情况多以及公众对其危害的防范意识不强等特点,容易被安检忽视,从而使车底成为了不法分子的犯罪温床。例如:恐怖分子通过将炸弹藏匿于车底,制造汽车炸弹恐怖袭击事件;贩毒分子通过藏毒于车底进行贩毒运输;偷渡人员通过藏身于车底进行通关偷渡等等。可以说车底就是潜在的安全隐患!
2. 应用场景
当前车底检测已被列入大多数安全检查场合的例行检查项中,以下六大类安全防范等级较高的场所都有针对底盘安全检测的需求。
1)监狱、看守所、政府机关、驻外使馆、军事基地、公安机关部门等安全防范、反恐重点场所;
2)海关、边境的出入口;
3)机场、车站、港口及码头等人员密集出入的场所;
4)银行金库等重要金融场所出入口;
5)大型、重要会议及活动场所出入口;
6)高速公路出入口检查站。
3. 现状分析
目前车底检查的方式主要有手持反光镜式、机器人摄像头式、IPC配置鱼眼相机镜头式和面阵相机轨道式四种,四者各自的功能简介和特点如下:
Ø 手持反光镜式
![]() 手持反光镜式,顾名思义就是人工手持一根末端带有反光镜的设备进行检查。需要车辆停在检查区,由安保人员将反光镜推入车底,通过镜面反射成像来观察车底情况。显而易见,这种检查方式工具十分简陋,其成像效果差、检测效率低。容易受检查人员的主观意识干扰,影响检查结果,导致漏检率高、精度差!另外检查结果没法进行实时存储记录,无法实现后期排查与追踪,特别是通过底盘改装进行藏匿物品的犯罪情况,基本只能靠经验判断而无法以之前存档数据进行对比分析,无法实现信息化。而且检查人员必须近距离操作,其人身安全得不到保障,如果车底藏匿危险物品,容易造成检查人员伤亡事件。
手持反光镜式,顾名思义就是人工手持一根末端带有反光镜的设备进行检查。需要车辆停在检查区,由安保人员将反光镜推入车底,通过镜面反射成像来观察车底情况。显而易见,这种检查方式工具十分简陋,其成像效果差、检测效率低。容易受检查人员的主观意识干扰,影响检查结果,导致漏检率高、精度差!另外检查结果没法进行实时存储记录,无法实现后期排查与追踪,特别是通过底盘改装进行藏匿物品的犯罪情况,基本只能靠经验判断而无法以之前存档数据进行对比分析,无法实现信息化。而且检查人员必须近距离操作,其人身安全得不到保障,如果车底藏匿危险物品,容易造成检查人员伤亡事件。
Ø 机器人摄像头式
![]() 机器人摄像头式,就是检查人员通过操作机器人移动方向杆,来控制装有摄像头的机器小车在车底进行移动采集车底图像信息,然后通过配置的小型显示器进行实况视频检查。这种方式同样要求车辆停在固定的检查区内进行人工操作检查。也存在检查效率低、漏检率高、精度差、人身安全得不到保障等问题。虽然可以对检查过程的实况视频进行录像存储,但由于单个视频占用存储空间大,导致可供存储的条数比较有限,而且后期调取做分析对比操作较复杂。
机器人摄像头式,就是检查人员通过操作机器人移动方向杆,来控制装有摄像头的机器小车在车底进行移动采集车底图像信息,然后通过配置的小型显示器进行实况视频检查。这种方式同样要求车辆停在固定的检查区内进行人工操作检查。也存在检查效率低、漏检率高、精度差、人身安全得不到保障等问题。虽然可以对检查过程的实况视频进行录像存储,但由于单个视频占用存储空间大,导致可供存储的条数比较有限,而且后期调取做分析对比操作较复杂。
Ø IPC配置鱼眼相机镜头式
![]()
![]()
![]() IPC配置鱼眼相机镜头式,就是视频监控领域网络摄像机配置鱼眼相机镜头,设备安装在地上,过车时通过调取网络摄像机实况画面,实时显示过车过程中整个车底图像实况,进行实时录像并存储到网络硬盘中。该方式车辆不需要停在固定的检查区进行人工操作检查,只需要车辆低速通过设备上方,检查人员在岗亭内观察车底图像视频信息进行判断车底是否存在异常。相比之前两种,检查效率提升,漏检率降低,精度得到提高,检查人员可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障。虽然通过网络硬盘存储过车视频录像,存储条数上明显增加,但后期调取做分析对比同样操作复杂。最关键的是由于鱼眼镜头成像畸变严重,导致车底图像边缘信息缺失严重,且视角只有120°左右,所以无法采集到车底边沿图像。
IPC配置鱼眼相机镜头式,就是视频监控领域网络摄像机配置鱼眼相机镜头,设备安装在地上,过车时通过调取网络摄像机实况画面,实时显示过车过程中整个车底图像实况,进行实时录像并存储到网络硬盘中。该方式车辆不需要停在固定的检查区进行人工操作检查,只需要车辆低速通过设备上方,检查人员在岗亭内观察车底图像视频信息进行判断车底是否存在异常。相比之前两种,检查效率提升,漏检率降低,精度得到提高,检查人员可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障。虽然通过网络硬盘存储过车视频录像,存储条数上明显增加,但后期调取做分析对比同样操作复杂。最关键的是由于鱼眼镜头成像畸变严重,导致车底图像边缘信息缺失严重,且视角只有120°左右,所以无法采集到车底边沿图像。
Ø 面阵相机轨道式
面阵相机轨道式,需要在地面开挖较长的地槽,在地槽内架设轨道,车底检查时需要将![]() 车辆停在地槽上方,然后由下方轨道上的面阵相机自动移动到不同的位置完成拍照,再将拍到的图片通过软件进行拼接形成完整的车底图像。这种方式漏检率较低,精度较好,检查人员同样可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障,且以图片的形式保存车底图像信息,后期调取做分析对比操作相对简单。但前期的施工量较大,开挖的槽长度较长(10m左右)。检测时需要停车较长时间,通行效率低。由于最终图片是由多张图拼接的,会导致部分重叠等问题,检测效果一般。而且由于下方轨道频繁启停运行,使用寿命受影响较大。
车辆停在地槽上方,然后由下方轨道上的面阵相机自动移动到不同的位置完成拍照,再将拍到的图片通过软件进行拼接形成完整的车底图像。这种方式漏检率较低,精度较好,检查人员同样可以在相距车辆一定距离的岗亭内进行车底安全检查,人身安全得到了保障,且以图片的形式保存车底图像信息,后期调取做分析对比操作相对简单。但前期的施工量较大,开挖的槽长度较长(10m左右)。检测时需要停车较长时间,通行效率低。由于最终图片是由多张图拼接的,会导致部分重叠等问题,检测效果一般。而且由于下方轨道频繁启停运行,使用寿命受影响较大。
可以看出这四种车底检查方式都有各自的局限性,主要缺陷点如下:
1)检查效率低:手持反光镜式和机器人摄像头式都要求车辆停在检查区内,通过人工操作检查,至少需要花费几分钟时间;面阵相机轨道式也要求车辆停在地槽轨道上方,然后由轨道上的面阵相机自动移动到不同位置拍图拼接成一幅完整的车底图片,但整个流程相对比较耗时,特别是像货车这种车体较长的车辆。总的来说,这三种方式通车效率均不高。
2)漏检率高-精度低:手持反光镜式和机器人摄像头式均是人工操作检查,受检查人员主观意识影响,容易出现漏检现象;IPC配置鱼眼相机镜头式由于鱼眼镜头成像畸变及视角小等原因,导致成像效果差,藏匿在车底边缘的物体容易出现漏检。
3)信息化程度低:手持反光镜式没法进行车底图像信息实时存储记录,无法实现后期排查与追踪,无法实现信息化;机器人摄像头式单个视频占用存储空间大,可供存储的条数少,信息化程度低。
4)检查人员人身安全保障性低:手持反光镜式和机器人摄像头式均需要近距离贴近车辆进行操作,如果车底藏匿危险物品,容易造成检查人员伤亡事件。
5)施工及后期维护成本高:面阵相机轨道式需要在地面开挖较长的地槽,并在地槽内架设轨道,前期施工繁琐,安装成本高;另外轨道频繁启停运行,使用寿命受较大影响,后期维护费用高。
4. 产品概述
针对当前车底检查方式及应用现状,我公司自主研发了车底检测系统。它是基于车牌为“身份”,自动检测车辆并对车底进行图像采集、显示、拼接、抓拍汇总、比对报警、自动环控为一体的车辆安检系统。该系统在车辆经过出入口时,通过车底盘线阵扫描成像系统对当前车辆进行底盘图像信息采集;在车辆通过后,将车底盘图片传输到主控台,并在系统软件管理平台界面进行显示,方便检查人员进行底盘异物识别。同时通过视频分析自动提取车辆车牌信息,然后将车辆车牌信息和车辆车底盘图片进行自动匹配并存档。能够有效防止车底盘藏匿炸弹、武器、生化危险品、危险人物出入重要场所;防止车底盘携带毒品、非法走私品乃至非法移民通过检查站。该系统由传统人工探测车底盘变为自动成像,车辆无须停止,以一定速度通过设备上方即可,极大提高了检查通行效率;可以在一定距离外的岗亭内观察过车车底图片,无须与检查车辆近距离接触,更好地保障安全检查人员的生命健康安全。
5. 系统结构及功能原理
车底检测系统由前端设备和后端平台两部分组成,前端设备进行数据采集和设备硬件控制,后端平台管理软件进行数据管理和应用。其工作原理如下:来车时由第一道地感线圈自动感应到来车触发信号,并将来车信号传输给控制器;由控制器给车检器和出入口相机同时下发功能触发信号,控制车检器开启补光灯,线阵相机开始图像采集,同时出入口相机抓拍识别车辆车牌信息,并将车辆车牌信息上传到软件平台;车辆通过第二道地感线圈后,由地感线圈自动感应到车辆离开,并将对应信号传输给控制器;然后由控制器给车检器下发工作停止信号,控制车检器将补光灯关闭,线阵相机停止图像采集,并将车辆通行过程中采集到的图像信息合成一副完整的过车车底图片,上传到软件平台;最后由软件平台进行数据存档和管理。
▲车底检测系统组成拓扑图
![]()
▲车底检测系统设备组成图
6. 系统各组件功能介绍
1) 触发模块(线圈):在车辆经过线圈时,给控制器发送对应触发信号。
2) 车检器:由线阵相机模组、LED补光灯组件和保护罩三部件组成。负责在车辆经过时采集车底盘图片,在车辆进入时开始采集,在车辆离开时停止采集,最后将采集到的图像合成一幅完整车底盘图片通过控制器交换机模块传输到主控台。
![]()
3) 出入口相机:在车辆进入或离开出入口时,识别采集车辆车牌信息,并在车辆经过后将车辆车牌信息通过控制器交换机模块传输给主控台。
4) 控制器:负责当车辆进入时,下发信号给出入口相机进行车辆车牌信息识别采集并将识别到的车辆车牌信息上传到主控台以及控制车检器开始采集车底盘图像;当车辆离开时,下发信号控制车检器停止采集车底盘图像,然后将采集到的图像合成一副完整的车底盘图片,通过控制器内置交换机模块上传到主控台;
5) 主控台:是一台安装有深圳市超盾电子有限公司自主研发的软件管理平台的工业级计算机,具备显示采集到的车底盘图片、记录车辆车牌信息、车辆信息管理、车辆进出车底盘图片对比、车底盘历史图片对比等功能。
7. 系统特性
l 画质效果好,视场角度大
Ø 车底图像分辨率最大可达2000万像素,达到A级要求,且图像主观评价满足GB/T 7401-1987的规定;
Ø 车底图像灰度等级最大可达11级,且图像灰度等级的判定满足GB/T 6996-2012的规定;
Ø 采用先进的线阵工业相机,结合深圳市超盾电子有限公司十多年深厚的ISP图像处理技术,确保车底成像画质出众;
|
|
▲深圳市超盾电子有限公司车底检测系统采集的车底图像效果 |
▲友商车底检测设备采集的车底图像效果 |
Ø 视场角最大可达180°,能够完整采集到轮胎轮廓边缘,做到无死角成像;
Ø 采用千万像素工业级镜头,成像畸变小、色彩还原好、失真度低、清晰度高。
|
||
▲车底图像完整呈现-无死角 |
||
|
|
|
▲车底图像放大效果-清晰度高 |
||
l 过车出图快,可存储追溯
Ø 无需停车检测,成像出图时间≤1秒;
Ø 图片可存储可追溯,存储载入时间≤1秒。
l 适应车速广,可准确测速
Ø 适用车速≤50km/h,最高适应80km/h;
Ø 不同车速,及变速通过情况下通过,检测均无压力;
Ø 支持对通过的车辆进行测速,测速结果误差在±10%以内。
l 防护性能优,安全等级高
Ø 防护等级为IP68,可适应长时间复杂多变的户外工作环境;
Ø 多重密封设计:防水、防尘、防潮、防霜、防雾、抗碾压;
Ø 良好的承重硬件设计,可承重30吨。
l 配套专业软件,支持功能全
Ø 具备车牌识别功能的系统,支持车牌信息关联车底图片;
Ø 支持按照日期、时间等信息快速检索到已采集的车底、车牌及车辆外观图像;
Ø 支持同时对8路1080P分辨率的前端摄像机视频进行解码,并显示实时视频监控界面;
Ø 支持对已采集的车底图像进行锐化、白平衡或调整对比度、饱和度等处理以取得最佳图像质量。
![]()
![]()
▲配套软件界面
l 支持平台对接,实现监控一体化
Ø 可对外支持SDK开发接入第三方平台。
l 其他功能特性
Ø 车底图像采集组件具备温湿度传感器,并能检测温湿度并显示;
Ø 设备控制箱:支持系统I/O控制、交互式智能控制;
Ø 具备联网集群功能,多台设备可以进行图片共享。
8. 产品技术参数
Ø 车底检测系统产品技术参数
备注:标注★项为控标优势点(即10、11、12、21、23、28、31项),供参考。
1) 采用彩色线阵工业相机扫描技术动态方式成像;
2) 底盘成像显示时间:≤1秒;
3) 底盘存储或载入时间:≤1秒;
4) 检测车辆底盘高度:60~2000mm;
5) 检测车辆底盘宽度:≤4500mm;
6) 适应环境温度:-35℃ ~ 70℃;
7) 视场角度:~180度;
8) 适应环境湿度:<90%RH;
9) 检测车速:建议≤50km/h,最高适应80km/h;
10) 车底图像分辨率:最大支持2000万像素,符合A级要求;★
11) 车底图像灰度等级:最大支持11级;★
12) 成像设备及结构组件防护等级:IP68,适应水下1.2m持续24小时;★
13) 车底图像扫描系统主体支持承压重量:30吨;
14) 底盘成像设备多重密封设计:防水、防尘、防潮、防霜、防雾、抗碾压;
15) 照明组件:6颗80W单体密封LED面光源,寿命≥60000h;
16) 支持系统供电范围:AC100V~240V;
17) 底盘图像数据传输距离:≤100米;
18) 车底图像显示方式:大幅面横向彩色显示;
19) 车底图像存储格式:标准JPEG图像格式;
20) 场景图像显示记录:≥1路(可扩充多路);
21) 具备车牌识别功能的系统,其车牌抓拍率:≥99%,识别率:≥99%;★
22) 支持以车牌信息关联车底图片;
23) 系统支持同时对8路1080P分辨率的前端摄像机视频进行解码,并显示实时视频监控界面;★
24) 系统软件支持对已采集的车底图像进行锐化、白平衡或调整对比度、饱和度等处理以取得最佳图像质量;
25) 系统支持按照日期、时间等信息快速检索到已采集的车底、车牌及车辆外观图像;
26) 系统支持对通过的车辆进行测速,测速结果误差在±10%以内;
27) 车底图像采集组件具备温湿度传感器,并能检测温湿度并显示;
28) 系统支持采集到通过车辆的完整轮胎,车底图像能够完整显示轮胎轮廓;★
29) 设备控制箱:支持系统I/O控制、交互式智能控制;
30) 具备联网集群功能,多台设备可以进行图片共享。
31) 图像采集性能等级试验:根据系统车底图像采集设备采集到的图像质量不同。产品图像质量应该要达到A级。图像主观评价应符合GB/T 7401-1987的规定,车底图像灰度等级的判定应符合GB/T 6996-2012的规定。★
Ø 工控机产品技术参数
1) 机箱:ARC-3600;
2) 电源:250WATX电源(AC100~240V自适应);
3) 主板:EMB-H81;
4) CPU:Intel I5-4570,主频3.2GHZ,4核 ,4线程;
5) 内存:8GB DDR3L工业级内存;
6) 硬盘:2TB HDD;
7) 串口:RS232*2;
8) 网口:2*10/100/1000M 自适应网口,1*10/100网口;
9) USB:6*USB Port;
10) 显示:VGA&HDMI;
11) OS:WIN7 64BIT 专业正版;
12) 认证:CE&FCC。
Ø 卡口相机技术参数
参数分类 |
参数名称 |
参数值 |
传感器类型 |
1/2.7英寸 CMOS |
|
快门 |
1/50~1/10000,手动或自动 |
|
扫描方式 |
逐行扫描 |
|
坏点校正 |
支持 |
|
曝光模式 |
支持全自动;自定义区间自动;自定义 |
|
白平衡 |
支持全自动;色温区间自动;自定义色温 |
|
边缘增强 |
支持 |
|
镜头参数 |
镜头接口 |
φ14 |
镜头焦距 |
2.7mm~12mm |
|
焦距控制 |
电动变焦 |
|
光圈控制 |
自动光圈 |
|
图像参数 |
图像压缩标准 |
JPEG |
图像分辨率 |
1920×1080或1600×1200 |
|
视频压缩标准 |
标准H.264 high profile 5.0 |
|
视频码率 |
H.264码率可调 |
|
视频帧率 |
25fps |
|
视频分辨率 |
1920×1080或1600×1200 |
|
图像设置 |
饱和度/亮度/对比度/白平衡/增益/3D降噪通过软件可调,支持宽动态 |
|
触发方式 |
I/O线圈触发 |
支持 |
RS485线圈触发 |
支持 |
|
视频检测 |
支持 |
|
功能 |
白名单 |
最大支持10000条白名单车辆,可直接联动道闸输出 |
智能识别 |
车牌识别、车身颜色识别、车标识别 |
|
远程控制 |
可通过Web方式远程配置、控制 |
|
OSD信息叠加 |
支持,可定义时间、地点、车牌等 |
|
图像防篡改 |
支持,视频/图片具备水印及校验功能 |
|
接口 |
内置LED灯 |
内置2个LED指示灯 |
网络接口 |
1个,100M以太网接口 |
|
RS485接口 |
1个 |
|
I/O输入接口 |
2路,光耦输入(开关量),可用于线圈输入 |
|
报警输出 |
2路,光耦输出,可用于联动道闸 |
|
存储接口 |
内置1个TF卡接口 |
|
常规参数 |
供电 |
AC 100V~240V |
功耗 |
<10W |
|
工作温度 |
﹣30℃~﹢70℃ |
|
工作湿度 |
10%~90% |
|
尺寸(mm) |
404×164×132 |
9. 软件平台功能介绍
显示车底采集图片和车辆车牌抓拍图片、出入口卡口相机实况画面、场景监控相机实况画面、记录过车信息、进出车辆数量统计显示、车底相机&出入口相机连接状态显示、过车车辆车牌截取显示、识别错误车牌号更改操作以及用户过车车底检查确认操作。
![]()
Ø 放大镜功能:对车底图片局部进行放大显示;
![]()
双击车底图片可以进入车底图片处理界面,对车底图片进行专业的图像处理(包括亮度、对比度、饱和度、色度调节、黑白处理、边缘增强及超级增强处理)。
![]()
Ø 车底盘图片对比
双击右侧过车列表中的某条记录,可以将该车底图片和对应的车辆数据库里的车底图片,以及前一次过车记录的车底进行比较。车辆信息和车辆数据库车辆车牌抓拍图片及车底扫描图片只有在车辆管理数据库中有对应车辆的信息时才有内容。
![]()
Ø 车辆管理:添加需要布防跟踪的车辆信息,包含车底图片和车辆车牌信息等。
![]()
Ø 过车记录查询
点击车辆查询按钮,进入过车历史界面查询,支持过车历史记录信息查询、查看及记录导出。支持按过车时间、抓拍设备、车辆颜色、车牌号码、车牌颜色及检查结果等条件进行设置查询。
![]()
注意:车辆信息一览,只有车牌对应的车辆信息已经事先录入到车辆数据库中时,才能显示。
Ø 产品清单
序号 |
物料名称 |
型号规格 |
数量 |
单位 |
备注 |
1 |
固定式车底扫描主体 |
1195*322*278 |
1 |
台 |
平板及以上厚度38MM |
2 |
底座 |
1300*390*270 |
1 |
台 |
|
3 |
室外机柜 |
850*600*220 |
1 |
台 |
|
4 |
控制盒(含绿插接头) |
1 |
台 |
2位插11个,6位插2个 |
|
5 |
卡口相机 |
1 |
台 |
根据抓拍车牌系统数量 |
|
6 |
8018支架 |
1 |
个 |
根据抓拍车牌系统数量 |
|
7 |
卡口相机立杆 |
高度1.2M |
1 |
个 |
根据抓拍车牌系统数量 |
8 |
工控机 |
1 |
台 |
||
9 |
显示器 |
20.5寸 |
1 |
台 |
|
10 |
键盘 |
1 |
套 |
||
11 |
鼠标 |
1 |
套 |
||
12 |
相机模组线缆 |
14*0.5 |
1 |
根 |
长度15M |
13 |
LED灯模组线缆 |
3*0.5六合一线缆 |
1 |
根 |
长度15M |
14 |
地感线圈 |
FVN 1.5 |
2 |
卷 |
65M一卷 |
注:
1. 以上物料为单车道单向扫描标准BOM单,请现场人员根据BOM清单进行核对。
2. 根据现场施工需要,请现场施工人员自备如下物料:
l 75MM镀锌钢管以及PVC管若干米(参考主设备安装位置至室外机柜的走线距离确定)。
l 32MM镀锌钢管或PVC管若干米(参考卡口相机位置至室外机柜的走线距离确定)。
l 根据现场实际情况准备3*1.5MM2 电源线缆若干米(参考现场配电柜至室外机柜、卡口相机至室外机柜的走线距离确定)。
l 根据现场实际情况准备六类屏蔽网线若干米(参考现场工控机放置位置至室外机柜的走线距离确定),六类屏蔽网线头若干。
l 根据现场实际情况准备超五类网线若干米(参考现场工控机放置位置至显示大屏或网络柜、卡口相机至室外机柜的走线距离确定)。
l 2*0.5MM2 线缆若干米(参考卡口相机位置至室外机柜的走线距离确定)。
l 高压防水胶带及绝缘胶带各一卷(每套设备)
l 玻璃胶及打胶工具一套(每套设备)
l 200MM长度木棍两根(预埋底座时支撑使用)